# 1、欧拉角
欧拉角是飞控系统中用于描述飞行器姿态的方式,使用三个角度来表示,分别是yaw偏航角、pitch俯仰角、roll 滚转角。
- yaw:偏航角,是指飞行器偏离原来航线的角度。
- pitch:俯仰角,是指飞行器机头抬起的角度。
- roll:滚转角,是指飞行器绕着自身头尾轴线翻滚的角度。
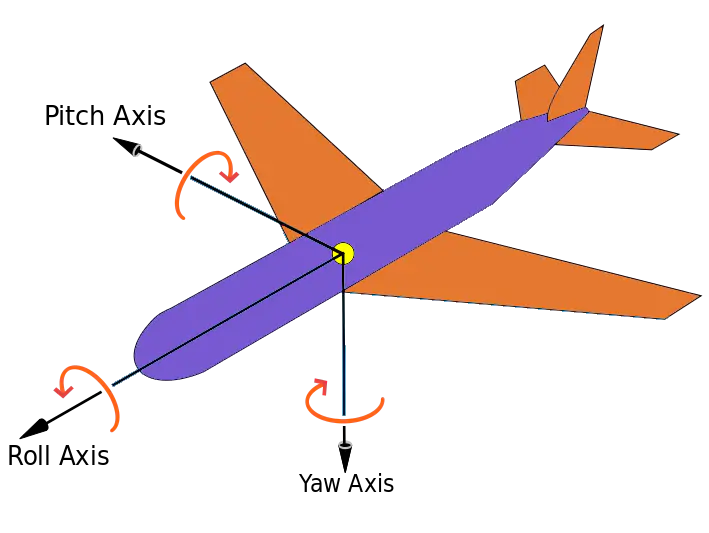
(图片来源于网络)
对比到笛卡尔坐标系,偏航角是绕着 Y 轴旋转的角度 α,俯仰角是绕着 X 轴旋转的角度 β,滚转角是绕着 Z 轴旋转的角度 γ。
注意: 欧拉角旋转时绕的轴系,既可以参照世界坐标系,也可以参照自身坐标系。本文所讲的都是参考自身坐标系。
欧拉角很容易就能表示出一个旋转运动,而且用角度来描述旋转。如 R=(α,β,γ)。
欧拉角旋转顺序有很多种。如XYX,XZX,YZY,YXY,ZXZ,ZYZ。
# 1、欧拉角的矩阵表示
以 XYZ 顺序为例,XYZ 顺序的欧拉旋转可以表示如下:

上面的公式有两种理解方式:
- 参照自身坐标系,先绕X轴旋转,再绕 Y 轴旋转,最后绕 Z 轴旋转。
- 参照世界坐标系,先绕 Z 轴旋转,再绕 Y 轴旋转,最后绕 X 轴旋转。
根据R=(90,90,90)欧拉角,分别根据自身坐标系旋转和根据世界坐标系来旋转发现,旋转之后的结果是一样的。
从而我们可以得到一个结论:一个复合变换矩阵,既可以理解为世界坐标系下的依次变换,也可以理解为模型坐标系下的依次变换,变换顺序相反。
# 2、根据欧拉角推导旋转矩阵
按照 XYZ 的顺序推导旋转矩阵,如下所示:

根据上面的推导公式,自然不难用javascript来实现一遍了。
function makeRotationFromEuler(euler, target){
target = target || new Float32Array(16);
var x = euler.x, y = euler.y, z = euler.z;
var cx = Math.cos(x), sx = Math.sin(x),
cy = Math.cos(y), sy = Math.sin(y),
cz = Math.cos(z), sz = Math.sin(z);
var sxsz = sx * sz;
var cxcz = cx * cz;
var cxsz = cx * sz;
var sxcz = sx * cz;
target[0] = cy * cz;
target[1] = sxcz * sy + cxsz;
target[2] = sxsz - cxcz * sy;
target[3] = 0;
target[4] = -cy * sz;
target[5] = cxcz - sxsz * sy;
target[6] = sxcz + cxsz * sy
target[7] = 0;
target[8] = sy;
target[9] = -sx * cy;
target[10] = cx * cy;
target[11] = 0;
target[12] = 0;
target[13] = 0;
target[14] = 0;
target[15] = 1;
return target;
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
# 3、欧拉角的缺点
计算过程涉及到大量三角函数计算,运算量大,这点在推导公式的过程中显而易见。
给定方位的欧拉角不唯一,有多个,这会对旋转动画的插值造成困难。同样一个姿态可以由好多个欧拉角来表示,即多对一的关系,那么在插值过程中就可能会引起姿态突变,产生抖动效果。
万向节死锁,这个现象会在第二个旋转轴旋转了90 度时产生,当第二个旋转轴旋转 90 度时,会导致第三个旋转轴和第一个旋转轴重合,此时如果继续绕第三个旋转轴,相当于在第一个旋转轴上旋转。所谓死锁并不是旋转不了了,而是少了一个自由度。
由于万向节死锁的问题:
1、欧拉角(x: 80, y: 90, z: 0)和(x: 30, y: 90, z: 50) 表示的旋转一模一样。多个欧拉角会对应一个旋转。这在做旋转动画时会导致旋转动画不准确的问题。
2、欧拉角(x: 47, y: 90, z:55)和(x: 8, y: 0, z: 0)和(x: 55, y: 90, z:55),这两个欧拉角最终的旋转效果也是不一样的。
结论:实际上欧拉角足以应对大部分场景,虽然它有一些缺点。我们可以做出一些限制来避免它们,比如我们可以将第二个旋转轴的旋转角度限制在 -90 到 +90 之间。但尽管如此,我们仍然无法规避死锁的产生。
# 2、四元数
# 1、四元数基础
四元数,顾名思义,是由四个数字组成,包含一个实数和三个复数,可以表示为:q = (w, x, y, z)或者q = w + xi + yj + zk。并且有以下特点i^2= j^2 = k^2 = -1。
四元数还可以理解为一个实数 w 和一个向量 u(x,y,z),q = (w, u)。
# 2、如何用四元数表示旋转
先将原向量表示为四元数q0=(0,vec{v}) ,将旋转角度和旋转轴的信息用单位四元数 q 表示,下面是一个代表旋转的四元数:q = cosθ+ vec{u}sinθ,其中旋转轴 vec{u} 必须是单位向量。实数部分是cosθ,虚数部分是sin(θ)v,
# 3、利用四元数实现旋转
我们至少需要以下三个方法才能对物体进行旋转:
- 通过如下三种方式构造出四元数。
setFromEuler,将一组欧拉角转化成四元数。setFromAxis,将轴角转化成四元数。setFromRotationMatrix,将旋转矩阵转化成四元数。
- 已知初始状态四元数和结束状态四元数,构造某一阶段的四元数。
slerp。
- 根据四元数计算出该四元数所代表的旋转矩阵。
makeRotationFromQuaternion。